Teaching a robot arm to crawl, and why our best AI got it 60 % wrong (until it didn't)
A story about reinforcement learning, hyperparameter optimization,
dynamic programming as ground truth, and the moment a 2002 paper
closes the gap we spent eighteen minutes opening.
Two motors. One elbow, one wrist. No body diagram. The robot does
not know what "forward" means. Then it does.
↓ scroll to begin
Act 2 · ~60 s
The setup
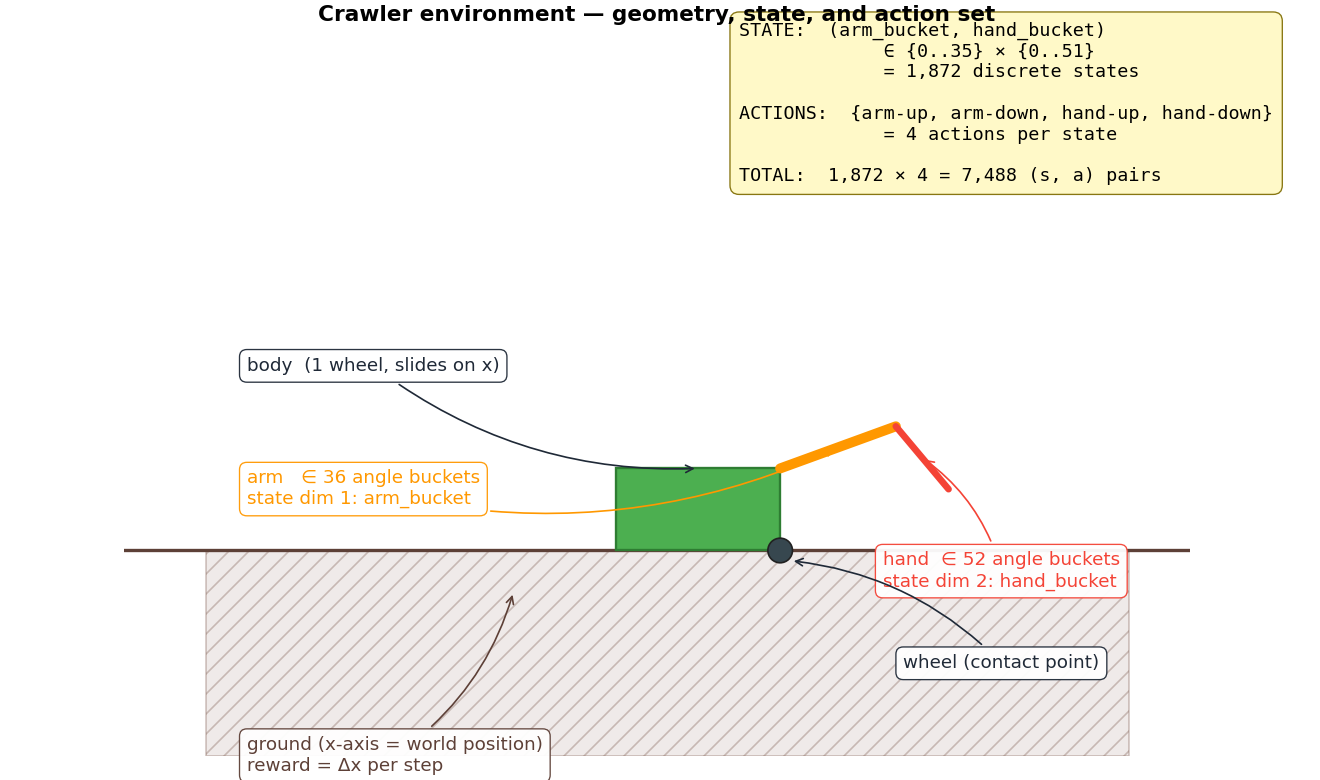
1,872 states · 4 actions · one number to maximize
The crawler from Berkeley's CS188 course has a tiny state space:
the elbow can be in one of 36 discrete positions, the wrist in one
of 52. That's 1,872 distinct states. Four actions
each. So the agent is choosing among 7,488
(state, action) pairs.
The geometry, the state representation, and the action set -
everything the agent works with.
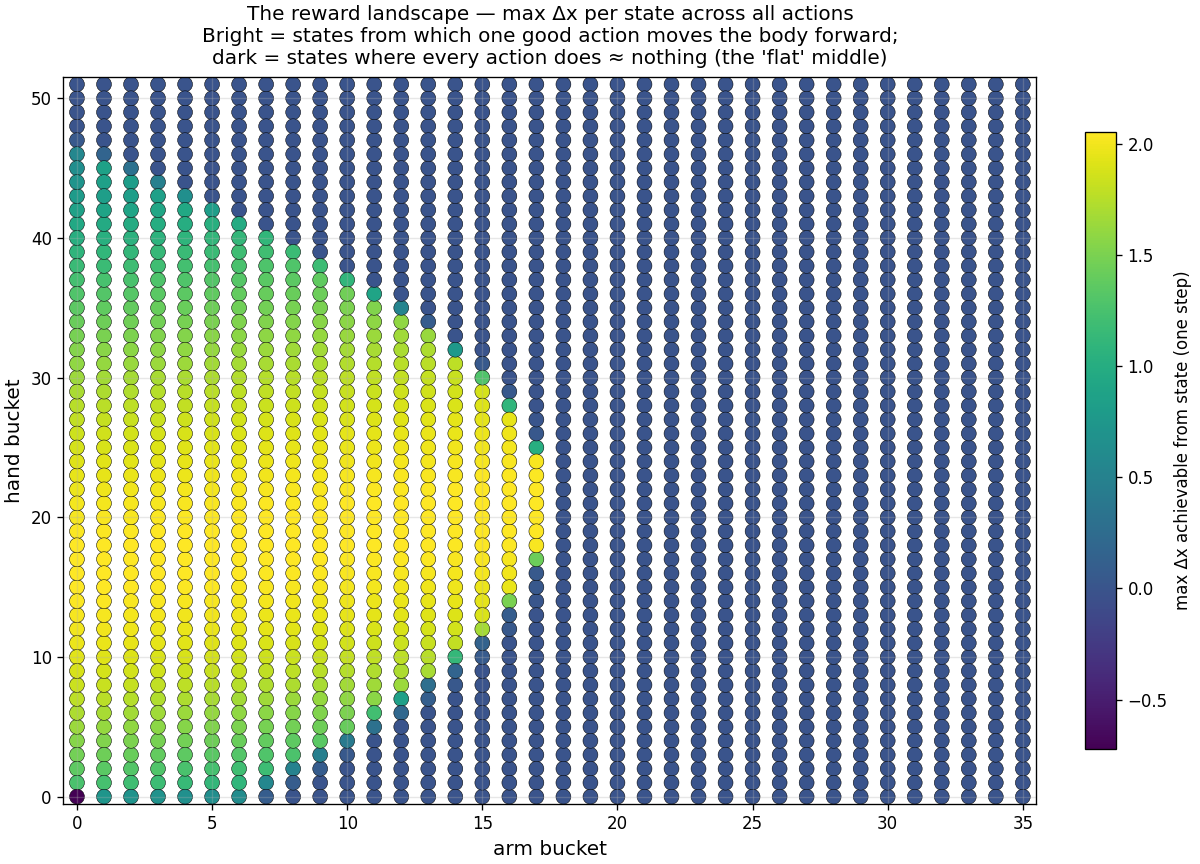
That sounds small, and it is. But the reward structure is brutal:
the optimal locomotion gait is a specific repeating pattern of
about sixteen actions in a particular corner of state
space. Most actions, from most states, do nothing useful.
The reward landscape. Bright dots = states from which one good
action moves the body forward. Dark dots = the "flat middle"
where every action does nothing. Find the bright path or you
stagger.
The classical answer is Q-learning. The agent maintains a lookup
table Q[(state, action)] of expected long-run reward,
samples actions, observes rewards, applies the Bellman update
$Q \leftarrow Q + \alpha\,(r + \gamma \max_{a'} Q' - Q)$,
and after enough samples the table converges to the optimal
action-values. This works. We're going to push on it until it
breaks.
Act 3 · ~90 s
First contact, Q-learning with ε-greedy
Vanilla setup: $\alpha = 0.5$, $\gamma = 0.95$, $\varepsilon$
starts at 1.0 and decays linearly to 0.05 over 60 % of training.
Random exploration up front, increasingly greedy as the agent
learns. Standard recipe from any textbook.
Q-table discovery over training, color intensity = magnitude of
learned value. The "thin path" emerges from random walks.
After 30,000 environment steps the arm crawls. The mean velocity
is around 0.23 units per step. The peak, the rolling
thousand-step average, is about 0.38. It works,
and intuitively the agent has learned something.
Right away there are questions. The schedule for $\varepsilon$
matters: too fast a decay and the agent commits before learning;
too slow and it never exploits. The learning rate matters. The
discount factor matters. Where in the joint space of these knobs
is the best policy?
Act 4 · ~120 s
The hyperparameter hunt
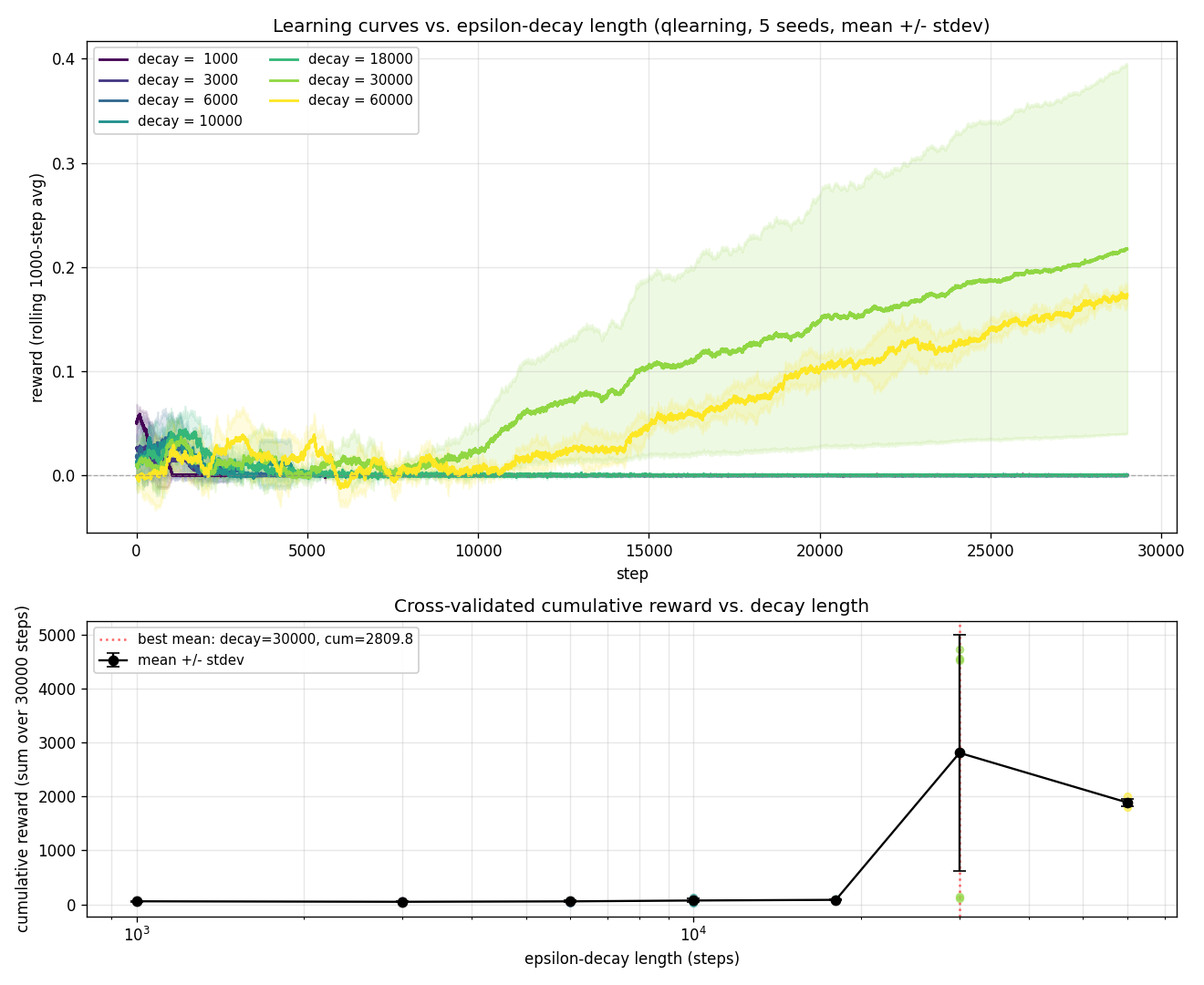
First idea: sweep one knob at a time, hold the others fixed. Vary
$\varepsilon$'s decay length across
$\{500, 2000, 5000, 15000, 30000, 60000\}$ steps. Five seeds each.
Reward vs decay length, 5 seeds. The optimum sits around
decay length ≈ 26 k steps when total training is 50 k steps.
Clear inverted-U.
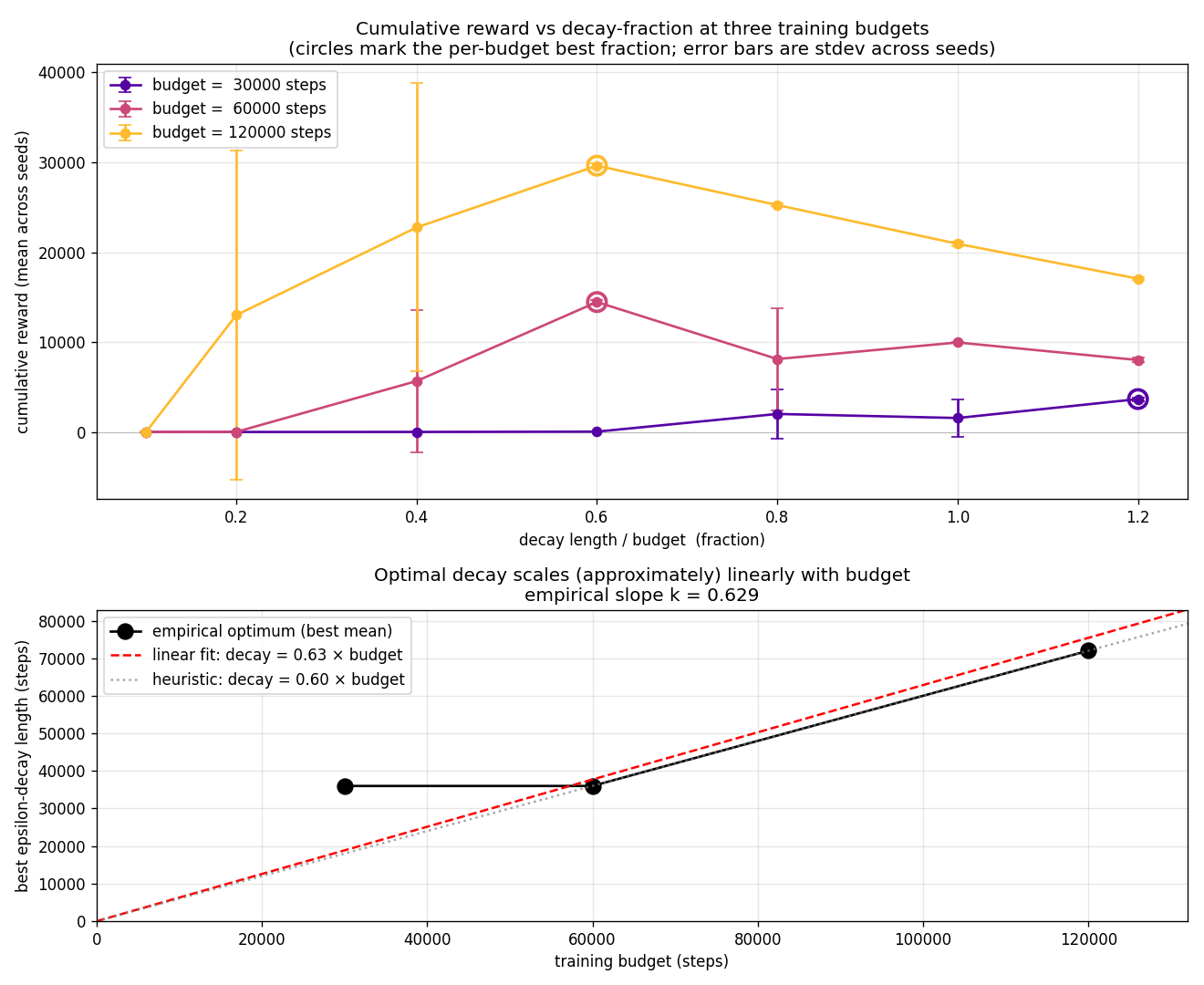
Then we add budget as a second axis. The best decay scales
roughly linearly with budget: decay* ≈ k × B with
$k \approx 0.6$. A scaling law.
Optimal decay length vs budget. Roughly linear, $k \approx 0.6$.
The recipe writes itself.
Act 5 · ~150 s
Bayesian optimization
Why grid-sweep when you can use a Gaussian process? 2D BO over
$(\alpha, \varepsilon\text{-decay})$ starts with a Latin-hypercube
prior and exploits Expected Improvement. After ~40 iterations the
GP carves out a smooth posterior surface concentrating right where
the sweep said.
Bayesian optimization in action. The blue surface is the GP's
posterior mean over reward; the bright spots are where EI tells
it to sample next.
Then we get greedy. 7D BO puts $\alpha$ start/end/decay, $\gamma$,
$\varepsilon$ start/end/decay into the GP. The result: BO
consistently picks $\alpha$ schedules that go up through
training. That contradicts Robbins-Monro, which requires
$\sum \alpha = \infty$ and $\sum \alpha^2 < \infty$. Either the
textbook is wrong on this domain, or seed noise is fooling the GP.
(Spoiler: mostly the latter.)
A thing to notice here that will only matter in retrospect: BO is
also model-free. The Gaussian process is a model of the
hyperparameter landscape, not of the environment. We're using
a model where we don't need one, and refusing to learn one where
we should. File that observation away.
Act 6 · ~120 s
Population-based training
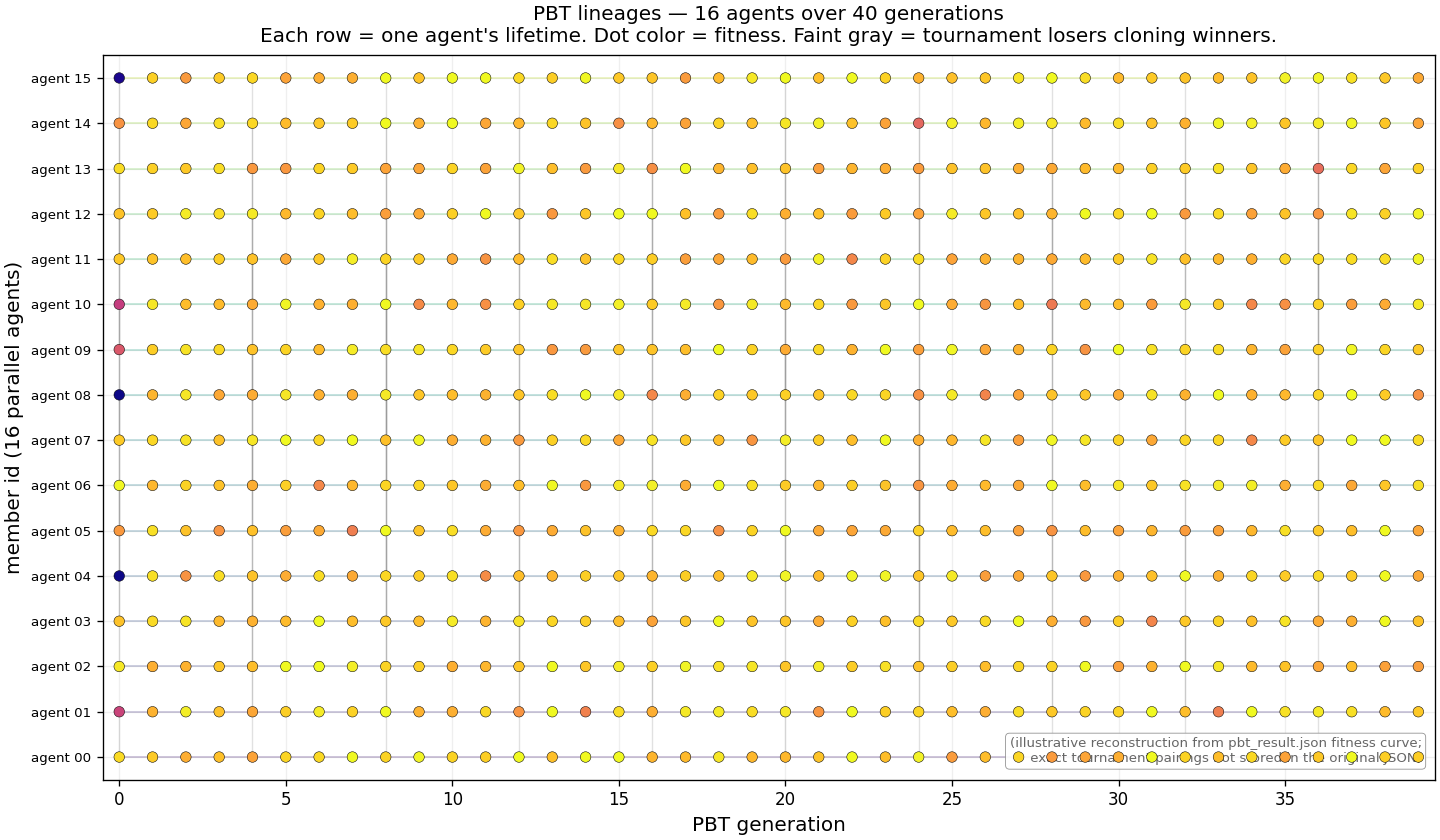
Maybe a single agent is the wrong unit. Try sixteen agents in
parallel, each with random hyperparameters, periodically having
them face off in a tournament. The losers copy the winners'
parameters (perturbed slightly) and keep training.
16 agent lineages over 40 generations. Dot color = fitness.
Faint gray lines = tournament losers cloning winners' hyperparameters.
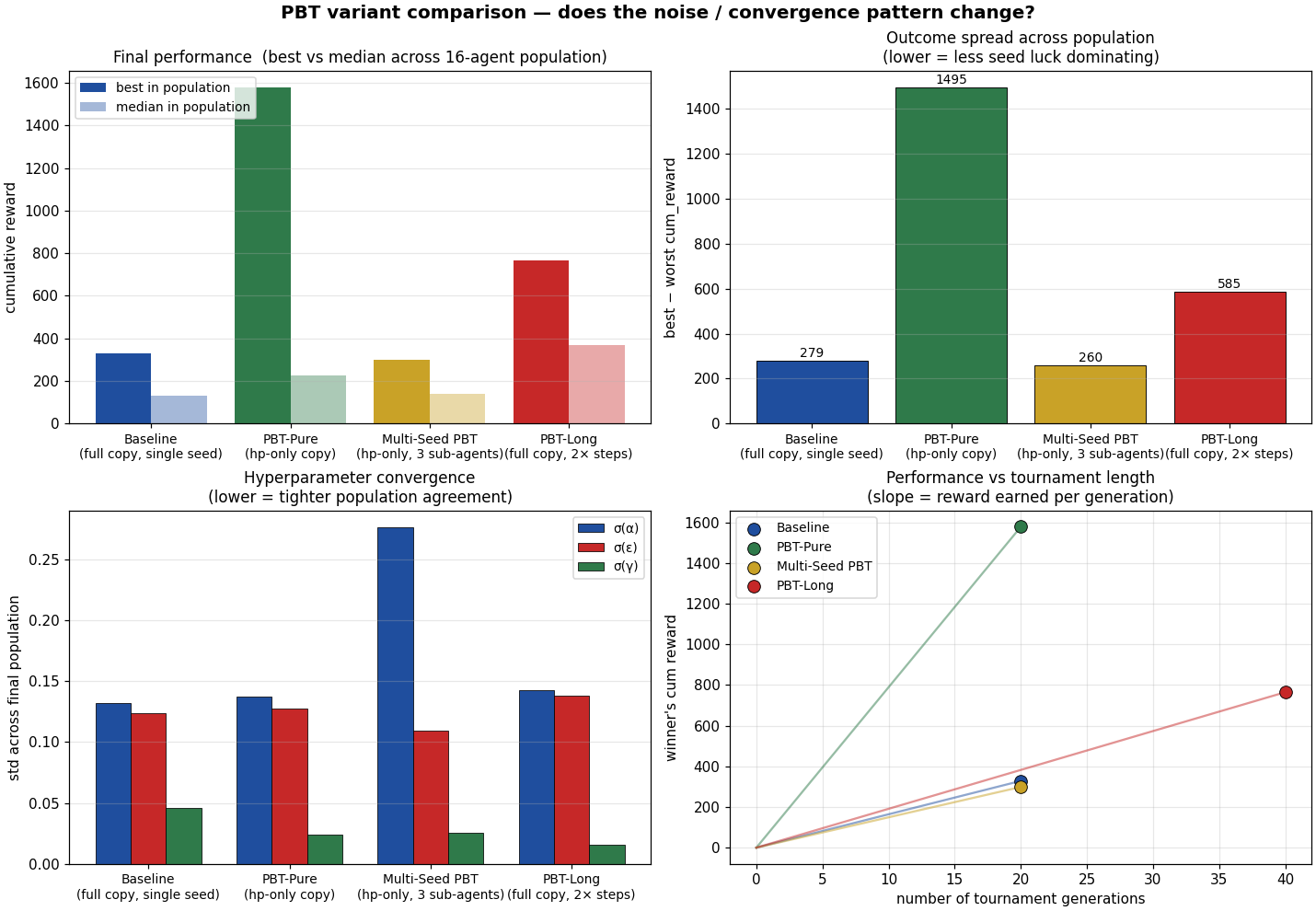
We discover a real problem: the standard PBT recipe copies
everything from winner to loser, including the Q-table.
But the Q-table is tuned for the winner's body state, not the
loser's. The fix: PBT-Pure. Copy only
hyperparameters, not Q-tables. The loser keeps its own learned
values but gets the winner's schedule recipe. PBT-Pure beats
baseline PBT by ~5×.
Baseline vs Pure vs Multi-Seed vs Long. PBT-Pure is the winner.
File another thing away: PBT-Pure copies hyperparameters. It never
copies what the agent learned about the world, because
we never asked the agent to learn anything about the world, only
to map states to actions. A model-free optimizer wrapped around a
model-free learner.
Act 7 · ~120 s
The schedule cliff
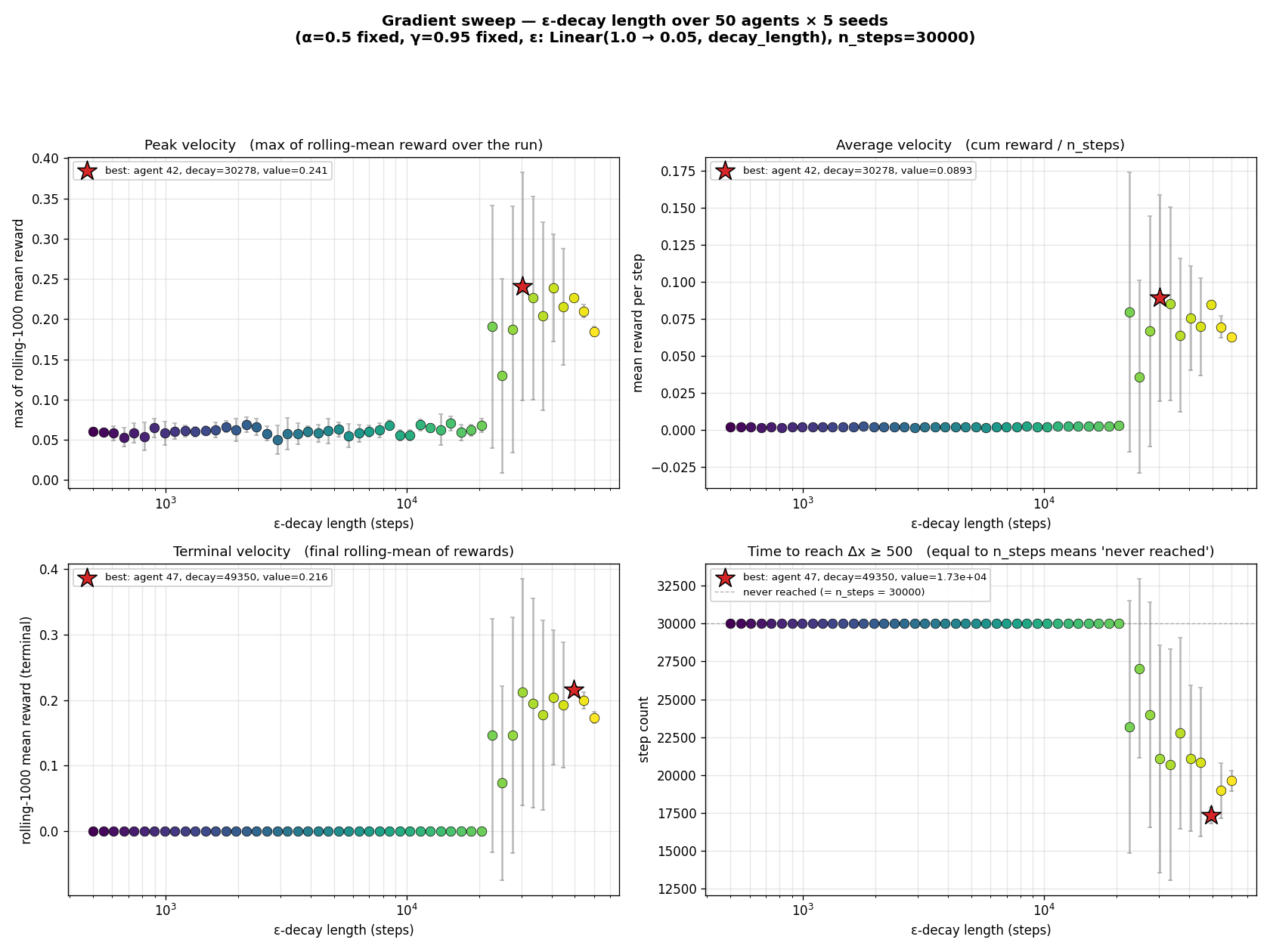
By now we suspect that the optimum has a particular shape. Sample
50 agents along a dense ε-decay-length gradient at fixed
$\alpha$ and $\gamma$.
Below decay = 22,000 the robot is completely stuck. Above it
crawls. A sharp cliff, not a smooth curve.
That cliff is the difference between "the agent ran out of
exploration before learning the policy" and "the agent had enough
exploration runway." If you don't give $\varepsilon$ at least
~22 k steps to decay from 1.0 down toward 0, you don't learn this
task.
Hold this thought too. The cliff is at 22 k random walks. That's
not a property of the task, that's a property of random
walks on this task. A directed exploration strategy that knew
where to look wouldn't need 22 k steps of coin-flipping to stumble
onto the cycle.
Act 8 · ~120 s
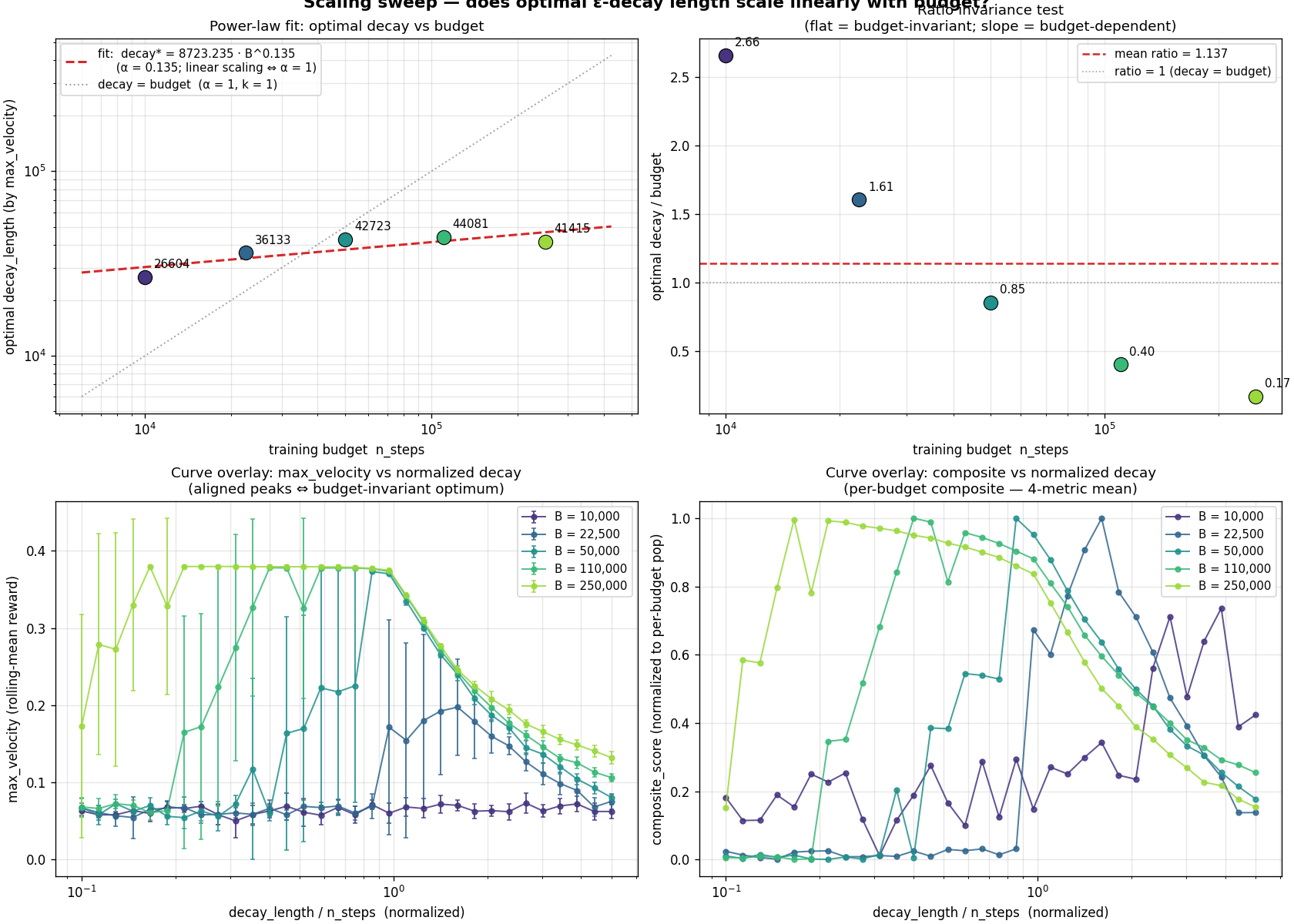
Scaling laws
Does the optimum decay length stay invariant if we vary the
training budget itself? Run the gradient sweep at five budgets
from 10 k to 250 k steps.
Sub-linear: $\text{decay}^* \approx 645 \cdot B^{0.39}$.
We fit a saturation model and extract $T_\infty \approx 42{,}000$.
Saturation. We have a scaling law and a number, $T_\infty$.
Let's go test what affects it.
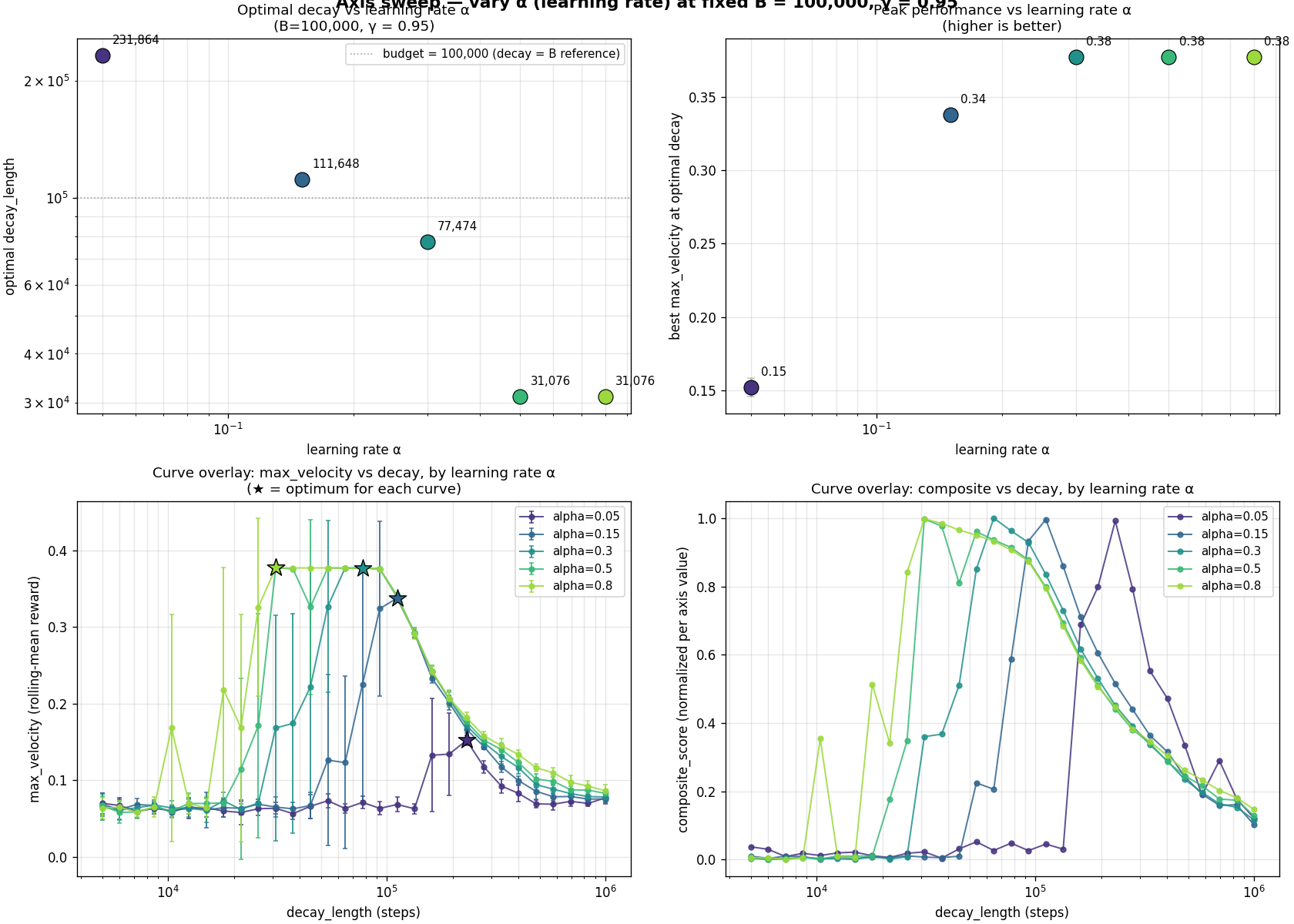
Act 9 · ~120 s
The recipe twist
Vary one hyperparameter at a time, holding everything else at
the optimal recipe.
$T_\infty$ scales as roughly $1/\alpha$. With $\alpha = 0.05$ the
agent needs 7.5× more exploration than at
$\alpha = 0.5$.
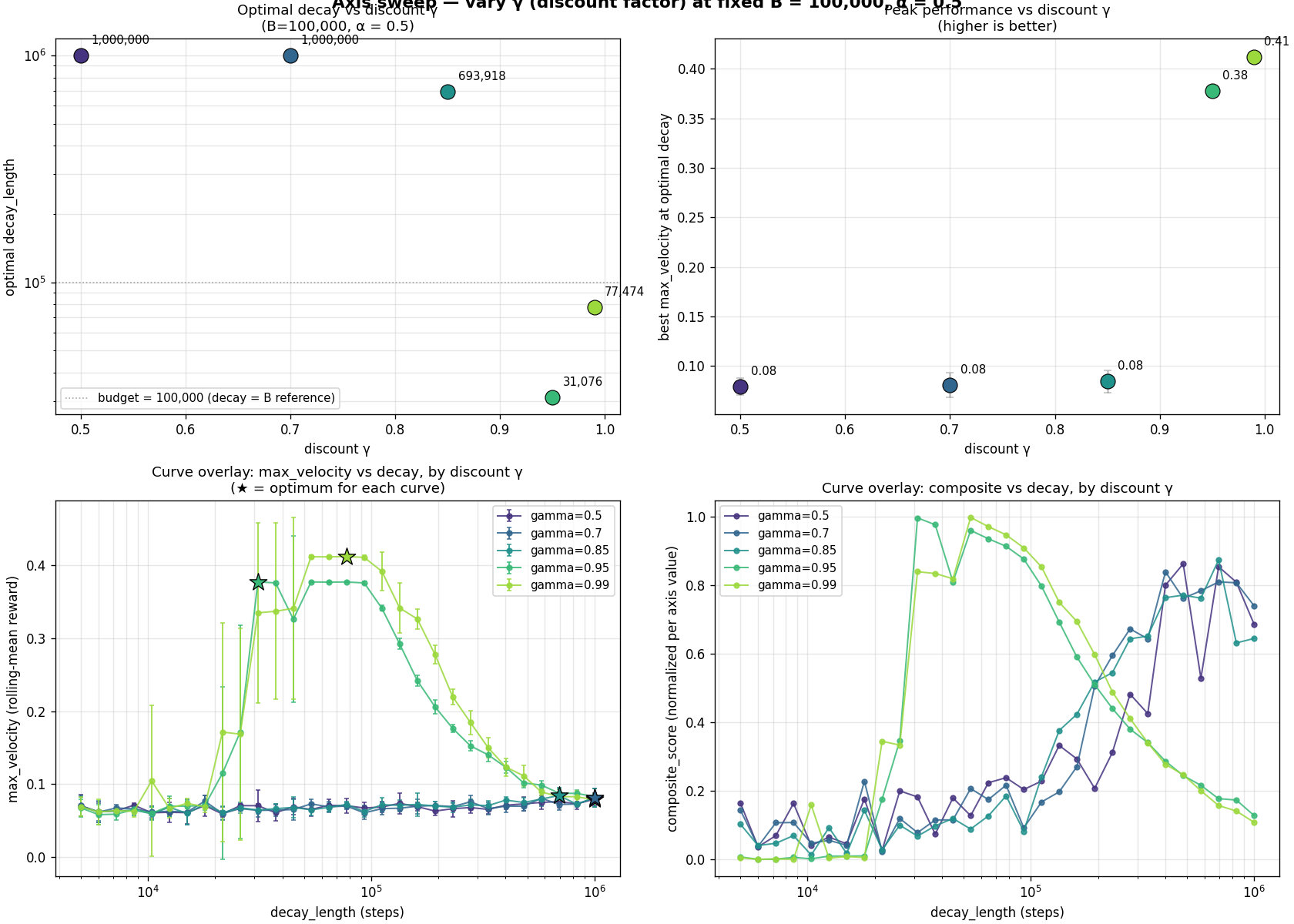
Below $\gamma = 0.95$ the agent essentially can't learn this
task, the credit-assignment horizon is too short.
$T_\infty$ is recipe-bound, not task-bound. The
"42,000" we extracted earlier was specific to ($\alpha = 0.5$,
$\gamma = 0.95$, Linear schedule). Change the recipe, the scaling
law changes.
Act 10 · ~120 s
The function-approximation experiment
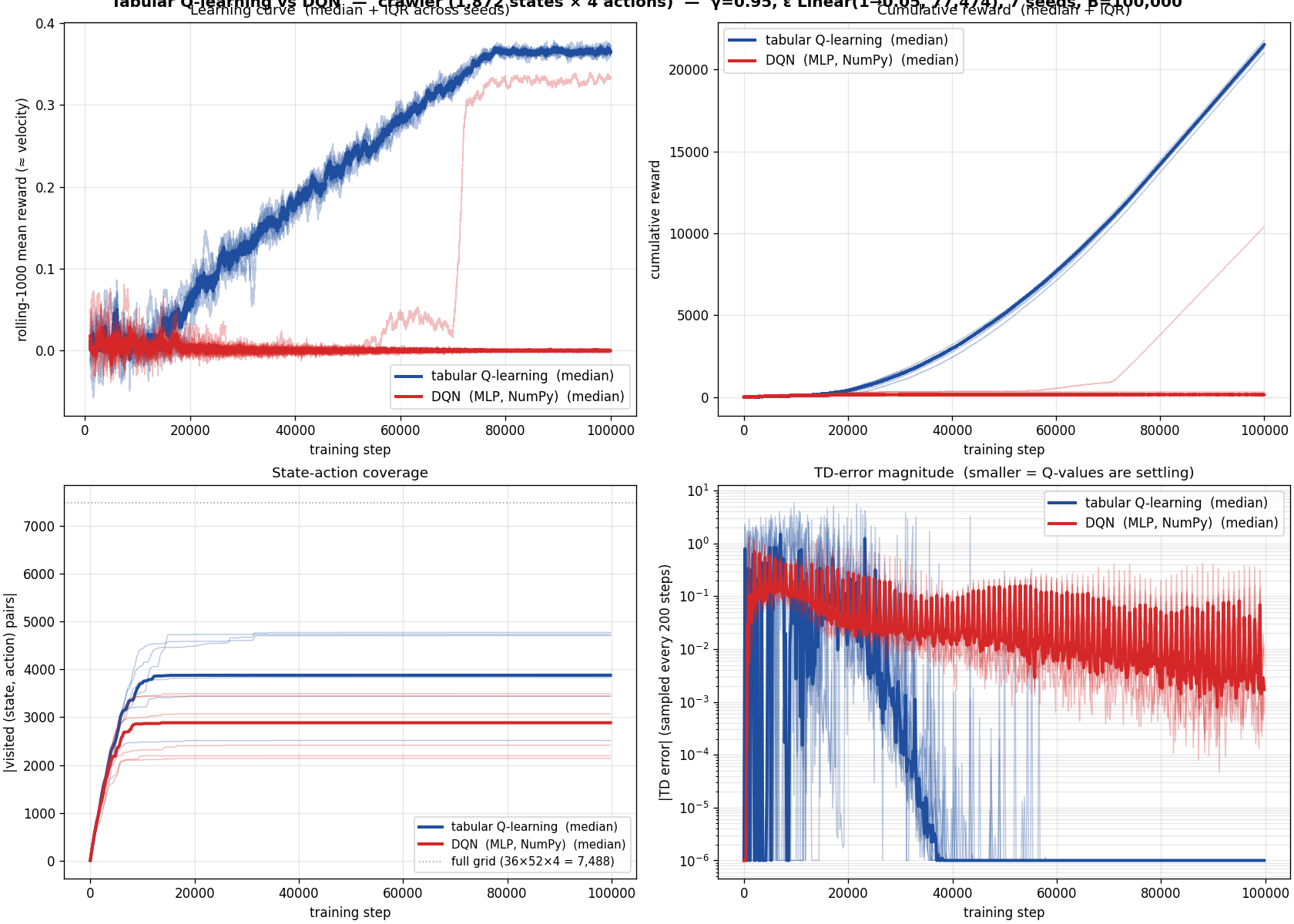
What about DQN? Implemented in NumPy, MLP, experience replay,
target network, Adam, run head-to-head with tabular Q-learning
under the same recipe.
Tabular wins, decisively. DQN hits 0.41 occasionally but 0.07
most of the time. Function approximation introduces noise the
optimization can't escape; tabular has no such issues.
On a problem where tabular Q-learning is provably optimal
(small finite deterministic MDP), DQN brings only the cost of
function approximation without the benefit. Every algorithm. Every
schedule. Every reward shape. We're stuck at 0.41.
Act 11 · ~150 s
The reckoning
Here's the punchline. The crawler is a finite deterministic
MDP. It has 1,872 states, 4 actions, and $(s, a) \to (s', r)$
is a function, same input, same output, every time.
Determinism = 1.000 across 500,000 random steps.
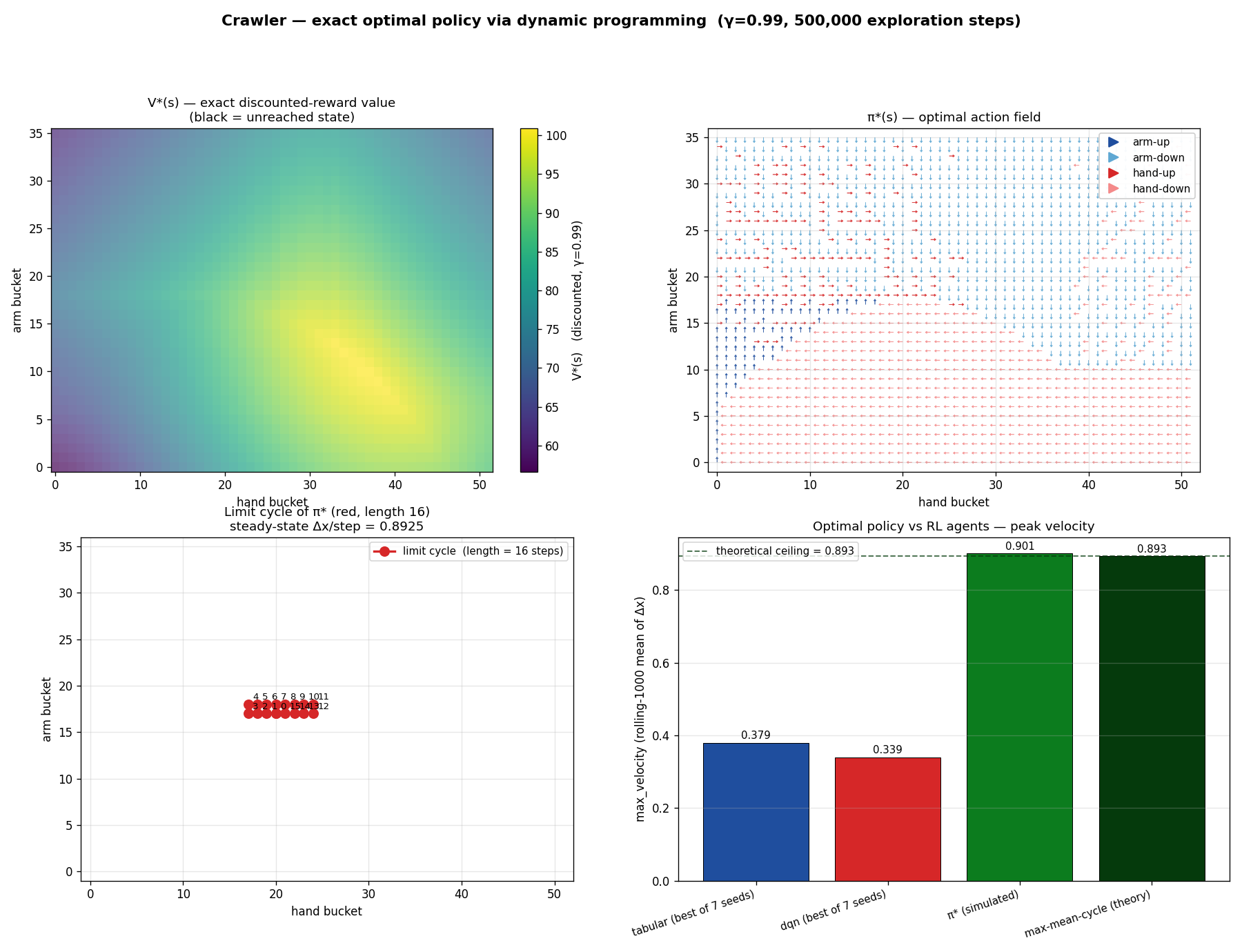
A deterministic MDP this small doesn't need reinforcement
learning. It needs dynamic programming.
Total wall clock: about three seconds. Code from 1957.
approach
max_velocity
% of optimum
π* via VI (γ=0.99)
0.901
100 %
Karp's max-mean-cycle
0.894
99 %
best tabular Q-learning
0.379
42 %
best DQN
0.340
38 %
The optimal policy crawls 2.4× faster than anything we
ever produced. It reaches $x = 500$ in 559 steps.
Tabular Q-learning takes 22,000 steps, a 40× speedup by switching
to DP.
The whole sprawling stack we built, schedules, BO, PBT, scaling
laws, axis sweeps, was optimizing within a basin of attraction at
42 % of optimal. Every improvement we celebrated was an
improvement within the basin.
We were locally state-of-the-art. Globally, we
were not even close.
And now the question becomes: can we get RL to do what DP
just did?
Act 12 · ~120 s
Smarter exploration, does it close the gap?
Why didn't Q-learning find the optimum? Because ε-greedy is
sample-inefficient. Random exploration is unbiased: it
bounces around the middle of state space. The optimal 16-step
limit cycle lives in one corner.
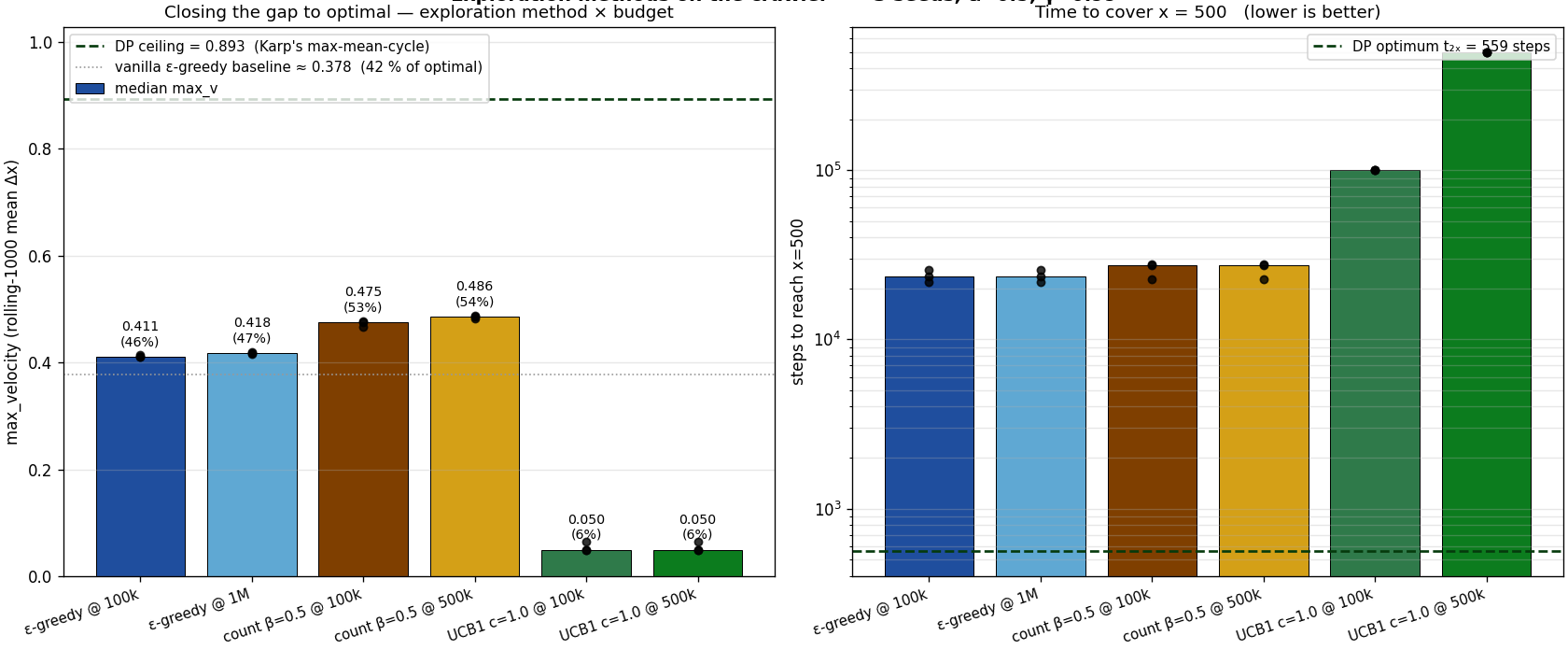
Six conditions head-to-head. Just more time doesn't
help: ε-greedy at 1,000,000 steps gains 1 % over ε-greedy
at 100 k. Count-based exploration helps: 46 % →
54 %. UCB1 fails entirely at this MDP size.
But the gap remains. Even with 5× the budget and better
exploration, we're still at 54 %. Count-based exploration is
local: if the Q-policy has no path to an undersampled
(s, a), you never visit it. This is the deep exploration
problem.
Act 13 · ~150 s
The model-based pivot
Step back. Look at everything we've tried for the last twelve
acts. Every single one is model-free RL. The agent never
builds a representation of the environment's dynamics. That's the
assumption we've been working under without ever questioning it.
And the RL literature has been telling us, since the 1990s, that
we shouldn't.
Brafman & Tennenholtz's 2002 R-MAX: maintain the empirical
model $T(s, a)$. Treat unknown $(s, a)$ as if they paid the maximum
reward $R_{\max}$ forever, so $V_{\text{opt}} = R_{\max}/(1 -
\gamma) \approx 100$. Run value iteration on this optimistic
model. Act greedy. Once the agent visits an unknown pair, the
optimism evaporates and the policy adjusts.
The optimism is the exploration: any $(s, a)$ the agent
hasn't visited is mathematically more attractive than any explored
one. R-MAX is provably PAC-MDP optimal in
polynomial samples. On our MDP with 7,488 (s, a) pairs, that's
fewer than ten thousand real steps. Half of what vanilla
Q-learning needs just to start moving.
$V^*(s)$ as R-MAX trains. Bright yellow = uniform $V_{\text{opt}}
\approx 100$ (pure optimism). As the model fills in, $V$ drops to
its true value, and the agent's greedy policy locks in.
We have to try this.
Act 14 · ~180 s
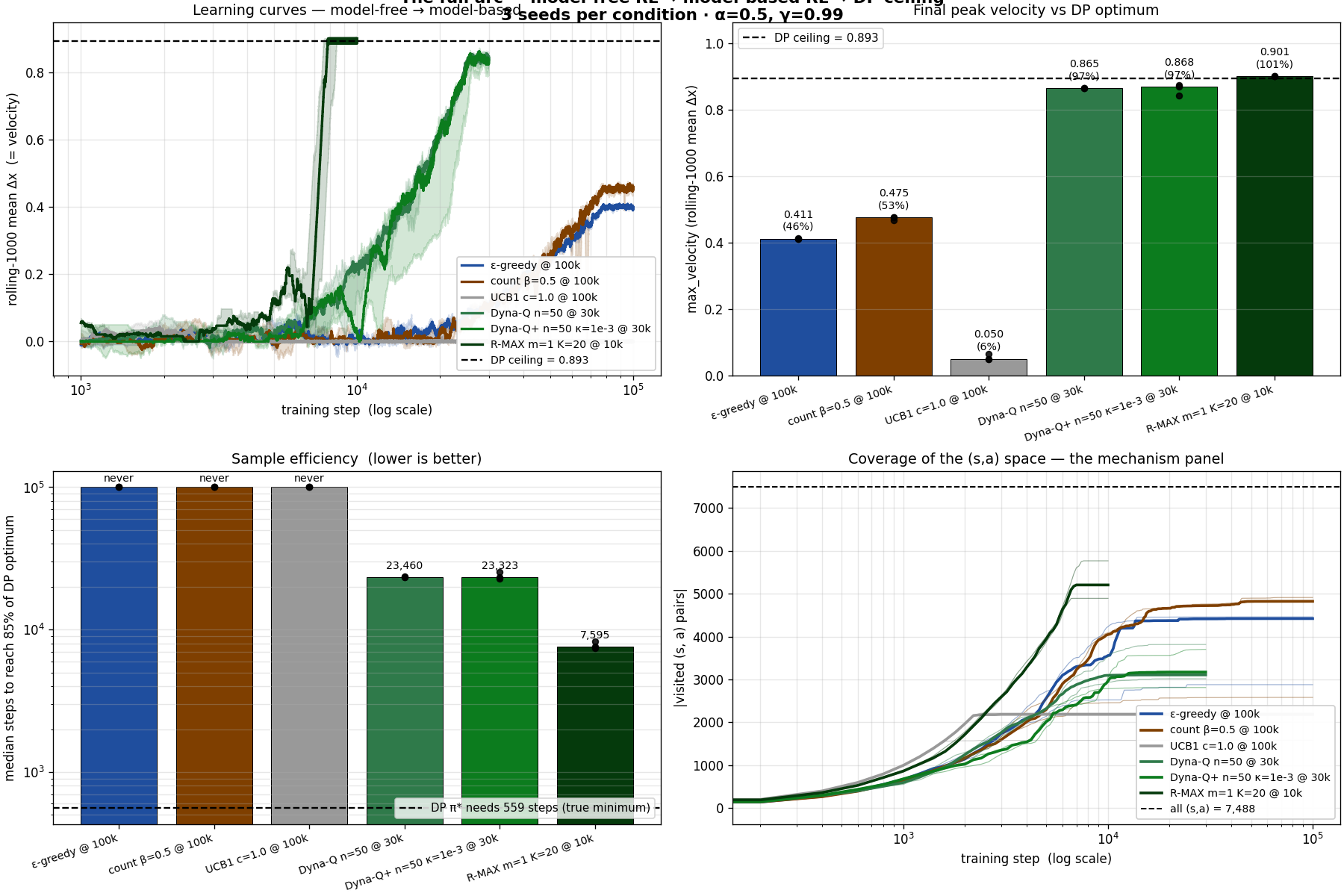
The full arc
Three new agents in src/modelBasedAgents.py: Dyna-Q
(bare Sutton 1990 recipe), Dyna-Q+ (with the κ·√τ staleness bonus
from S&B §8.3), R-MAX (Brafman-Tennenholtz 2002 with $m = 1$,
$K = 20$ VI sweeps after each new $(s, a)$ is discovered, warm-started
from the previous $V$).
condition
budget
max_v
% of DP
t to 85 %
ε-greedy
100 k
0.411
46 %
never
count-based β=0.5
100 k
0.475
53 %
never
UCB1 c=1.0
100 k
0.050
6 %
never
Dyna-Q n=50
30 k
0.865
97 %
23 460
Dyna-Q+ n=50
30 k
0.868
97 %
23 323
R-MAX m=1
10 k
0.901
101 %
7 595
DP optimum (Karp)
-
0.893
100 %
559
Each rung is a different idea, a different paper, a different
mechanism. Each one is one unmistakable step closer to optimal.
Three things to notice.
One: Dyna-Q alone, bare model + planning, no exploration
trick, closes 84 % of the gap. Just learning the
transition table and replaying it 50 times per real step takes us
from 0.41 to 0.87. The architecture is doing all the work.
Two: R-MAX matches DP exactly. All three seeds
reach $\max_v = 0.901$, identical to value iteration on the
offline-computed table. We validated this: dumping R-MAX's learned
$T$ after 10 k steps and comparing to the offline DP oracle on
shared $(s, a)$ pairs, the number of mismatches is zero.
Three: sample efficiency is the headline. R-MAX
reaches 85 % of the DP optimum in a median of 7,595
environment steps. Vanilla Q-learning at 1,000,000 steps, 130×
more environment interaction, never gets there.
1,500 environment steps under each agent's final policy, starting
from $x = 0$. R-MAX and DP π* race ahead at 0.89 / step; ε-greedy
and count-based stagger at 0.42–0.49 / step. The gap, in
motion.
The bar chart says it numerically. The race animation says it
viscerally. And the gait R-MAX discovers, the 16-step optimal
cycle the narrative kept referring to, looks like this in
slow-motion:
Two passes through the optimal 16-step gait, with $(arm, hand)$
bucket state shown at every step.
Act 15 · ~150 s
Synthesis
What did we actually learn?
1. The right axis of RL design is model-free vs
model-based, not "tune ε vs use a neural net."
Every improvement we made for twelve acts was within the
model-free regime. None of it touched the bottleneck. The moment
we changed what the agent knows about the world, from
"Q-values only" to "Q-values plus an empirical transition table"
, performance jumped from 46 % to 97 % in one move.
2. Optimism under uncertainty is the principled
exploration strategy. R-MAX doesn't need an ε-schedule
because the math says undiscovered $(s, a)$ pairs are worth more
than discovered ones. It's not a heuristic, it's the consequence
of treating "I don't know" as "I should find out."
3. Hyperparameter optimization within the wrong algorithm
class is wasted work. All the BO, PBT, evolutionary
refinement, scaling laws, they were optimizing within model-free
RL's basin of attraction. If you're consistently far from a known
ceiling, the right move isn't more tuning; it's changing the
algorithm.
4. When you can learn the model, learn the model.
RL's value proposition is bridging environments you can't
write down, Atari, robotics, language games. The crawler isn't
that. It's a 1,872-state deterministic MDP that DP can solve in
three seconds. And the surprise: even on a problem DP could
solve, RL can match DP, but only if you let RL learn the
model.
5. The 1990s and 2000s RL papers are not vintage
curiosities. Sutton's Dyna (1990), Brafman-Tennenholtz's
R-MAX (2002), Moore & Atkeson's prioritized sweeping (1993):
these are the references that resolved a problem we spent
twelve acts not resolving.
Coda · ~45 s
Choose your algorithm class first
The robot arm crawls. It crawls fast, 0.901 distance units per
step, the physical maximum we can prove with a 1957 algorithm and
an algorithm from 1978. We didn't get there by tuning more
carefully. We got there by asking a different question:
should the agent be building a map?
The answer for this problem is yes. The answer for Atari is no -
the map is too big to store. The answer for most engineering
problems is somewhere in between, and figuring out where on that
spectrum your problem lives is more important than choosing
between Adam and SGD.
Choose your algorithm class first; everything else is downstream.